Home
CV
Research
Publications
Teaching
Res ancillares
Personal
Contact
☰
Robot design and control for long-duration autonomy
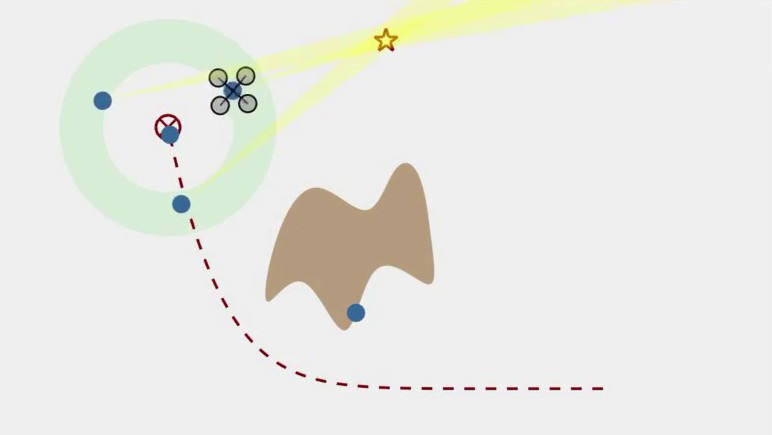
Resilient heterogeneous multi-robot systems
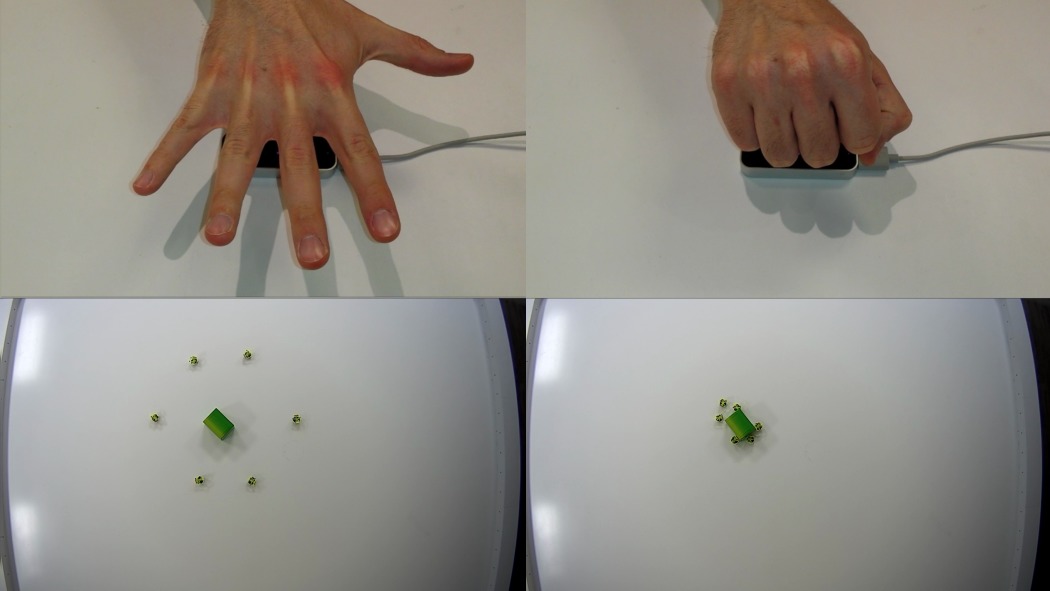
Human-multi-robot interaction