Human-multi-robot interaction
In applications where robots interact with humans, one of the most important aspect to consider is safety. This involves keeping both human beings and robotic systems safe, preventing the former to be harmed and the latter to brake.
Moreover, when human operators need to control robots through, for instance, predefined gestures or joysticks, an equally important aspect to take into account is the intuitiveness of the interaction. This entails the design of mappings between the inputs that a human being is able to provide to the control inputs required by a robotic system.
Safe and passive interaction control
Passivity is a control-theoretic concept which allows us to reason about behaviors of dynamical systems from an energetic point of view. For this reason, it is possible to define the safety of a human-robot interaction system in terms of its passivity properties. Safety in control theory is also often identified with the concept of forward invariance, where we aim at confining the state of a dynamical system within a prescribed safe set. While this is complementary to the notion of passivity, both can be encoded as constraints for the interaction control system and enforced holistically.
One of the causes for a system to be non-passive or unsafe is communication delay. In a joint work between the GRITS Lab at Georgia Tech and the Fujita-Yamauchi Lab at Tokyo Tech, the effect of real internet communication delays on the coordination of two multi-robot systems located in two different labs separated by 11,000 km has been studied. The above video summarizes the first experiment of its kind. The next video shows the same technique applied to the formation control of a multi-robot system with artificial communication delays.
References
- R. Funada, X. Cai, G. Notomista, M. W. Surya Atman, J. Yamauchi, M. Fujita, and M. Egerstedt, “Coordination of robot teams over long distances. From Georgia Tech to Tokyo Tech and back: An 11,000km multi-robot experiment”, IEEE Control Systems Magazine, Vol. 40, No. 4, pp. 53-79, 2020
- G. Notomista and X. Cai, “A Safety and Passivity Filter for Robot Teleoperation Systems”, International Workshop on Human-Friendly Robotics, 2020
- G. Notomista, X. Cai, J. Yamauchi, and M. Egerstedt, “Passivity-based decentralized control of multi-robot systems with delays using control barrier functions”, IEEE International Symposium on Multi-Robot and Multi-Agent Systems, 2019
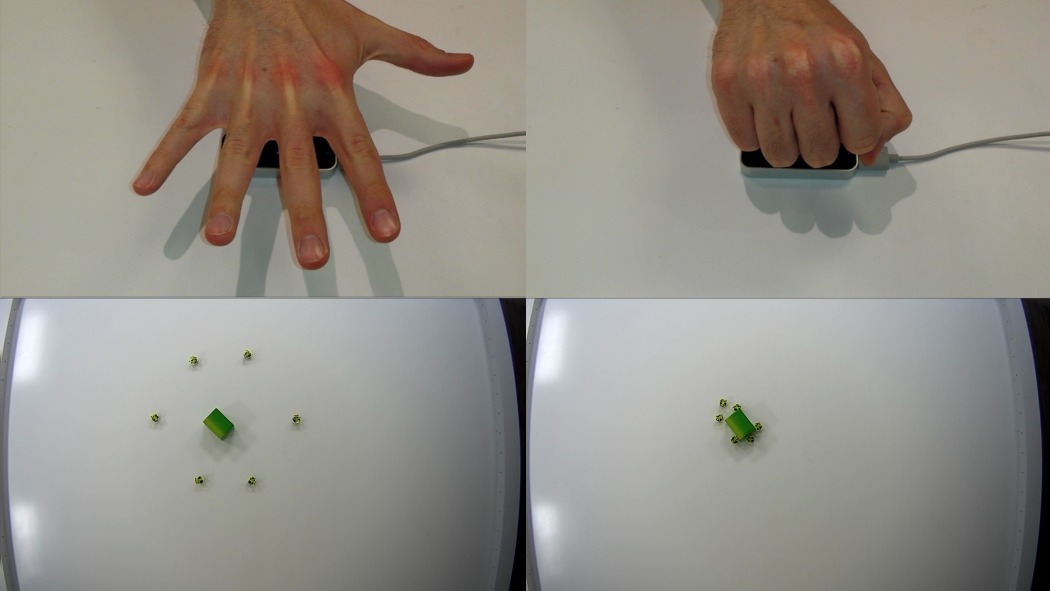
Human-multi-robot interaction for object grasping
In this preliminary work, done in collaboration with Mario Selvaggio from the Università degli Studi di Napoli Federico II, we developed an
intuitive human-multi-robot shared interaction control for applications of object grasping and manipulation.
The kinematic of the human hand is mapped to the kinematic of the multi-robot system in order to naturally
control a large number of robots using intuitive grasping gestures.
References
- M. Selvaggio and G. Notomista, “Towards natural human-swarm teleoperation using hand synergies”, Workshop "Swarms: From Biology to Robotics and Back" at IEEE International Conference on Robotics and Automation, 2018